ここから本文です
自律型海中ロボットによる駿河湾深海の生物調査を実施~水深約200m地点での生物画像撮影などに重点。サクラエビ検出の可能性も視野~

2019年03月08日
東海大学海洋学部航海工学科海洋機械工学専攻准教授の渡邉啓介〔わたなべ けいすけ〕研究室では、来る3月11日(月)から15日(金)までの5日間、自律型海中ロボットを利用した駿河湾深海での生物調査を実施いたします。
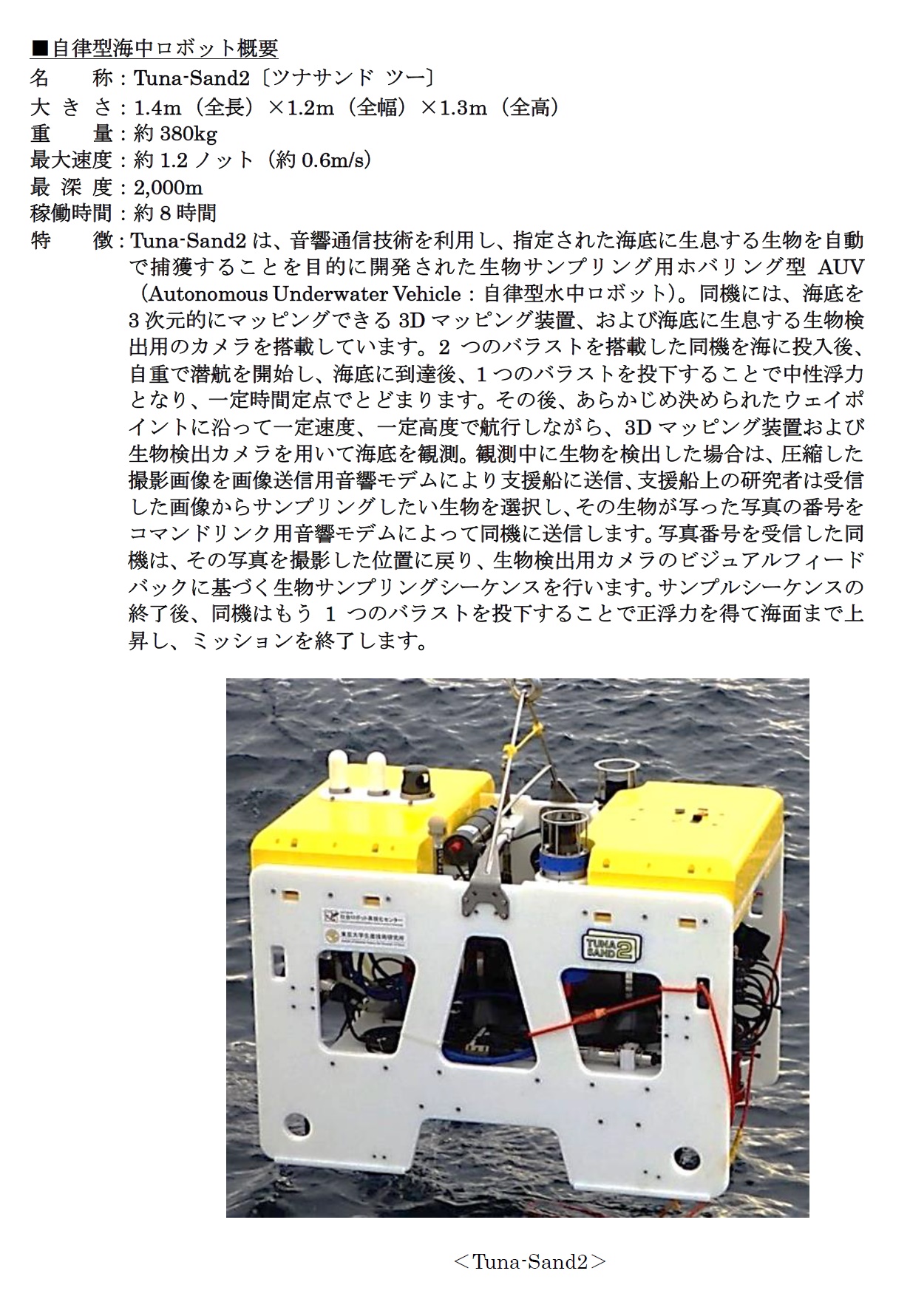
今回の調査では、東京大学と九州工業大学の共同研究によって開発された自律型海中ロボット「Tuna-Sand2」を利用し、水深200メートル程度の場所で、海底から一定高度を航行しながら、底質画像マッピングと生物の検出・撮影などを行います。調査に利用する「Tuna-Sand2」は、自動で海底を見て写真を撮り、ある程度の取捨選択をした上で船上の研究者に画像情報と採取するかどうかの判断を委ねる信号を送信。この信号に対して研究者が採取を指示する信号を送ると、自動で命令された地点まで戻り、当該生物を採取します。2018年3月には水深100メートルでの撮影・サンプリングに成功しました。
当日は、本学および九州工業大学、西日本工業大学の教員、学生など13名が本学の調査練習船「北斗」に乗船。特に今回は、枯渇が懸念される駿河湾の生物資源「サクラエビ」が検出されそうな水域での調査を重点的に行う予定です。なお、当日撮影した海底の生物画像は、報道関係の皆さまへのご提供が可能です。
■実施概要
日時 :2019年3月11日(月)~15日(金)9:00~16:00
※荒天による実施の可否・スケジュールの変更は、8:30に判断します。
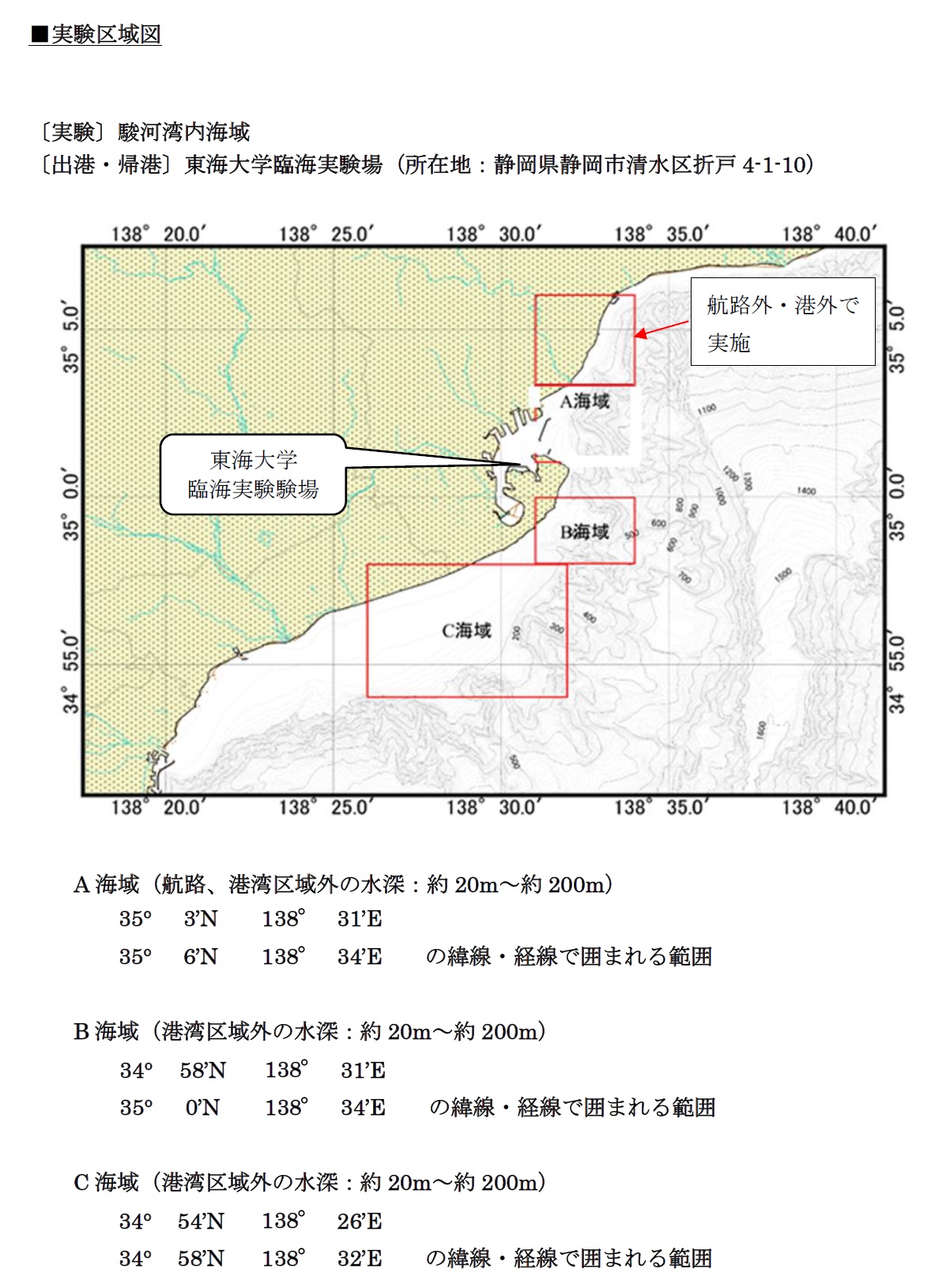
場所 :駿河湾内(次頁の地図参照、東海大学海洋臨海実験場 桟橋より出港・帰港)
内容 :自律型水中ロボット「Tuna-Sand2」を用いて、駿河湾の水深約200m地点の立体的底質マッピングおよび生物画像の取得、サンプリング
参加者:九州工業大学 /大学院生命体工学研究科 石井和夫教授(主任研究者)のほか、
教員3名、学生4名
西日本工業大学/工学部総合システム工学科 園田隆准教授
東海大学 /海洋学部航海工学科 渡邉啓介准教授(総括責任者)のほか、
教員1名、船長1名、機関長1名
■この件に関するお問い合わせ
東海大学 清水事務課 担当:石田・石神・逆井 TEL.054-334-6913(直通)
今回の調査では、東京大学と九州工業大学の共同研究によって開発された自律型海中ロボット「Tuna-Sand2」を利用し、水深200メートル程度の場所で、海底から一定高度を航行しながら、底質画像マッピングと生物の検出・撮影などを行います。調査に利用する「Tuna-Sand2」は、自動で海底を見て写真を撮り、ある程度の取捨選択をした上で船上の研究者に画像情報と採取するかどうかの判断を委ねる信号を送信。この信号に対して研究者が採取を指示する信号を送ると、自動で命令された地点まで戻り、当該生物を採取します。2018年3月には水深100メートルでの撮影・サンプリングに成功しました。
当日は、本学および九州工業大学、西日本工業大学の教員、学生など13名が本学の調査練習船「北斗」に乗船。特に今回は、枯渇が懸念される駿河湾の生物資源「サクラエビ」が検出されそうな水域での調査を重点的に行う予定です。なお、当日撮影した海底の生物画像は、報道関係の皆さまへのご提供が可能です。
■実施概要
日時 :2019年3月11日(月)~15日(金)9:00~16:00
※荒天による実施の可否・スケジュールの変更は、8:30に判断します。
場所 :駿河湾内(次頁の地図参照、東海大学海洋臨海実験場 桟橋より出港・帰港)
内容 :自律型水中ロボット「Tuna-Sand2」を用いて、駿河湾の水深約200m地点の立体的底質マッピングおよび生物画像の取得、サンプリング
参加者:九州工業大学 /大学院生命体工学研究科 石井和夫教授(主任研究者)のほか、
教員3名、学生4名
西日本工業大学/工学部総合システム工学科 園田隆准教授
東海大学 /海洋学部航海工学科 渡邉啓介准教授(総括責任者)のほか、
教員1名、船長1名、機関長1名
■この件に関するお問い合わせ
東海大学 清水事務課 担当:石田・石神・逆井 TEL.054-334-6913(直通)